

2022@online
SoCAV 2022 was held online via Webex Meeting successfully during May 20-22, 2022.
Keynote Session:
Prof. Daxin Tian--Beihang University, China
"Innovative Applications of Edge Computing in Cooperative Vehicle Infrastructure System (CVIS)"

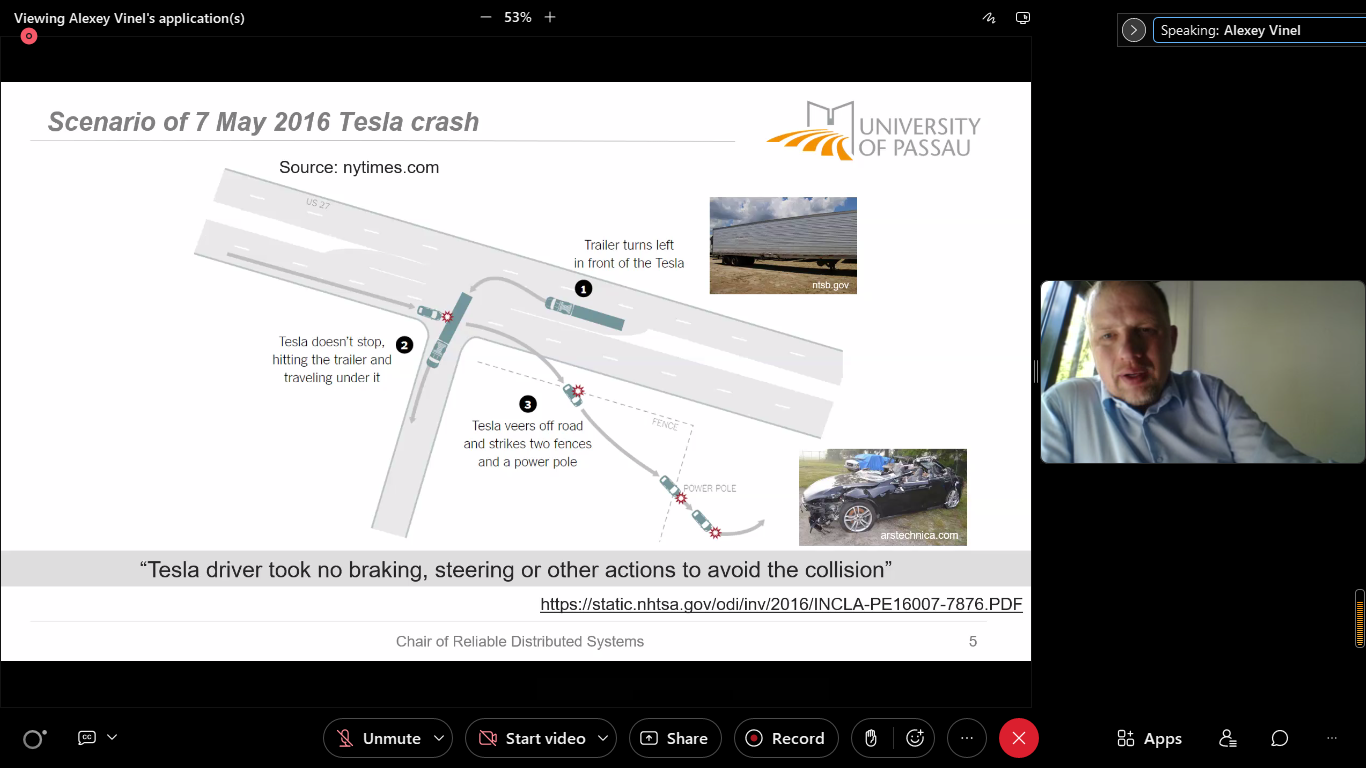
Prof. Alexey Vinel--University of Passau, Germany and Halmstad University, Sweden
"Autonomous Vehicles: Wireless Networking for Cooperative Maneuvering"
Oral Session:
Awards & Certificates:
Best Student Paper:
AS1002--Amarin Kloeker
"Map-Based Registration of Multi-LiDAR Infrastructure Sensor Setups for Real-Time Applications"

Best Paper:
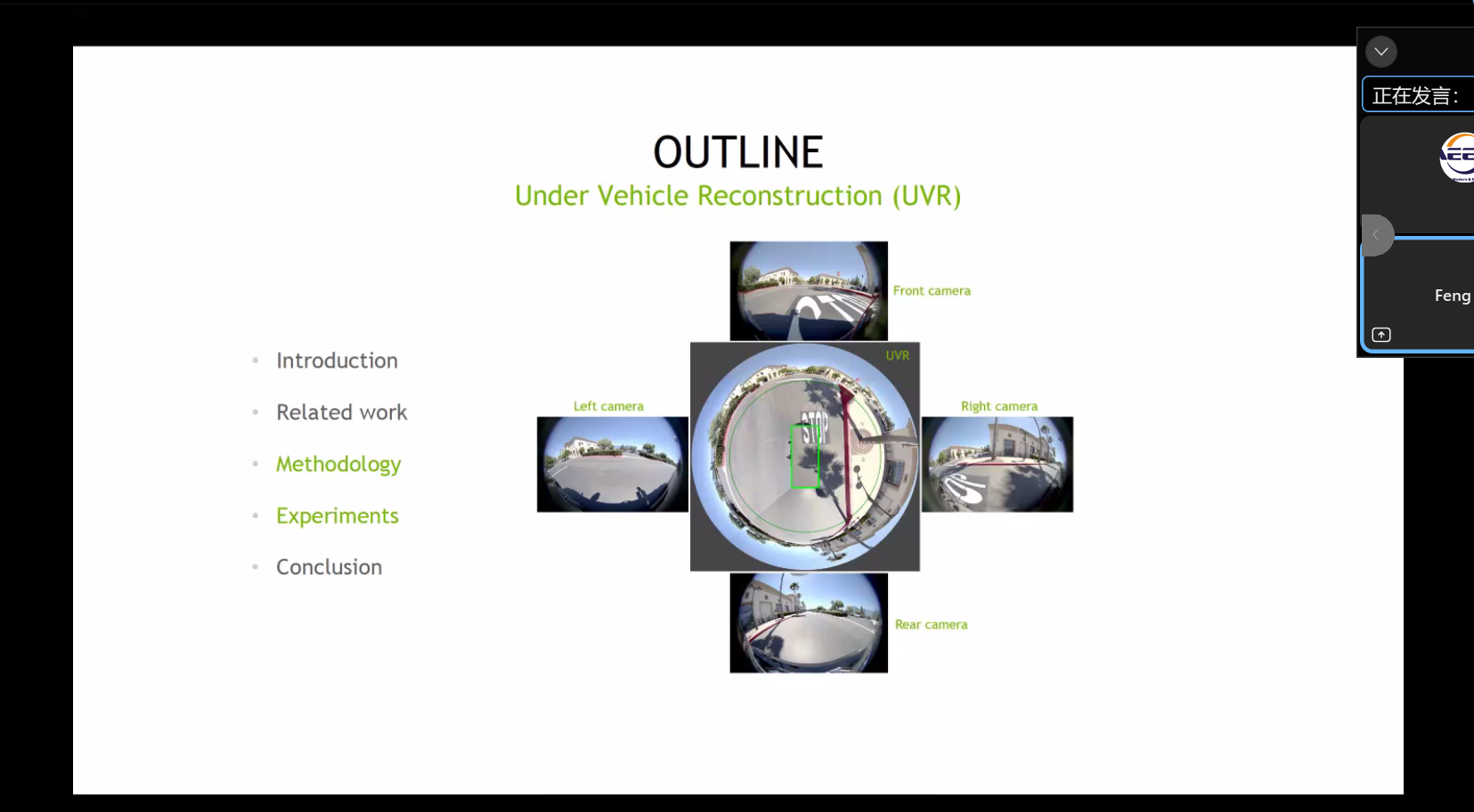
AS008--Feng Hu
""Seeing" the Invisible: Under Vehicle Reconstruction (UVR) for Surround View Visualization"

For the recorded conference video, you can download from the linkage:
https://iaeeee.my.webex.com/iaeeee.my/ldr.php?RCID=68093b64790a2ab061d1e27ffd1229d0
Organizer

IAEEEE
Follow us
 |  | |